Navigation Components Overview¶
The modular building blocks of Kompass
Kompass is designed to make autonomous navigation easy to set up, flexible to customize, and powerful enough for robots working in changing real-world conditions. Think of it as a collection of building blocks: you choose the ones you need, configure them for your robot, and you’re good to go!
Kompass Components and Main Tasks¶
Each component runs as a ROS2 lifecycle node and communicates with the other components using ROS2 topics, services or action servers:
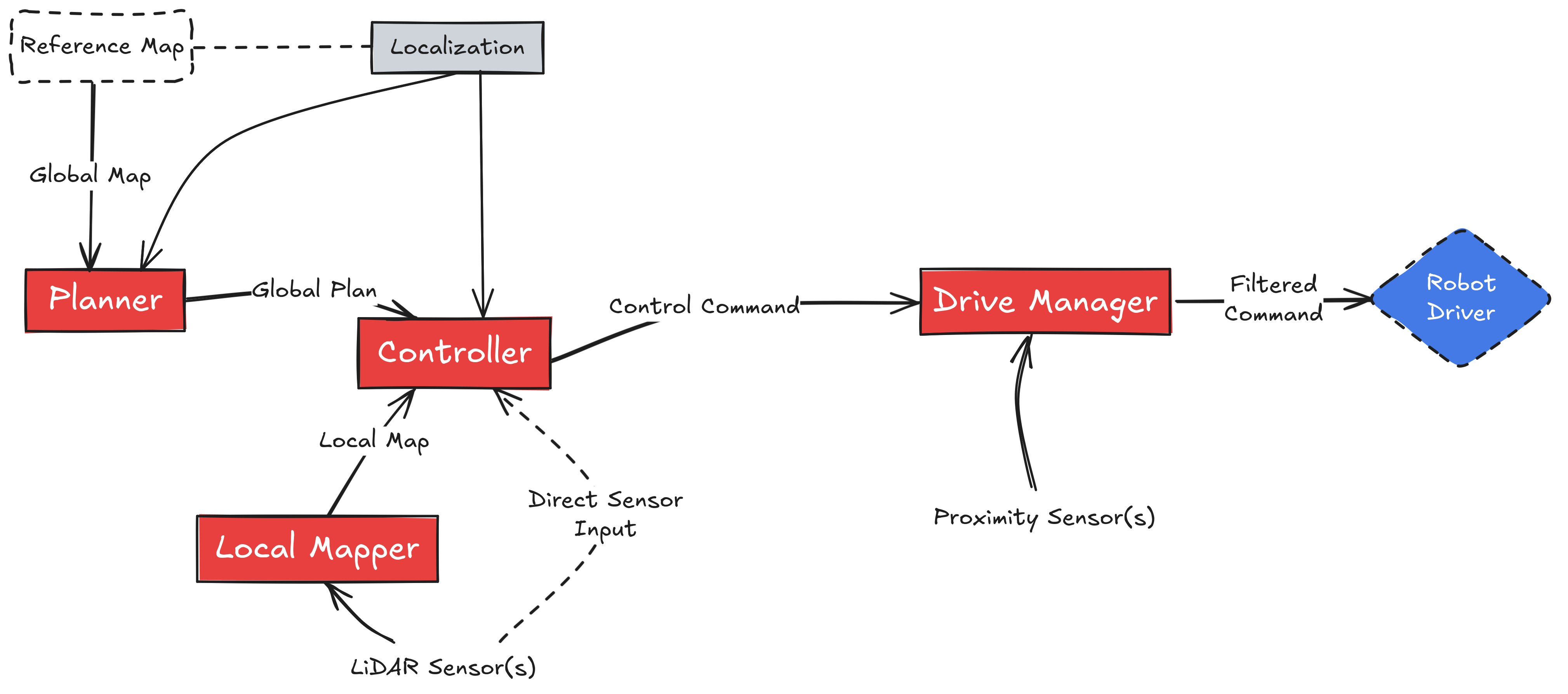
System Diagram for Point Navigation¶
In the following, we give a quick tour of the core navigation components, what each one does, and what sensors you actually need to get Kompass up and running.
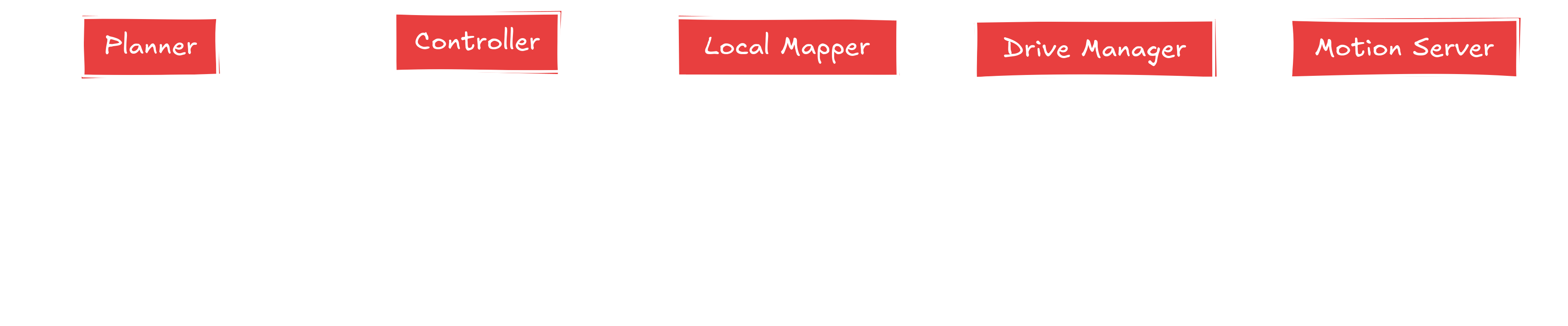
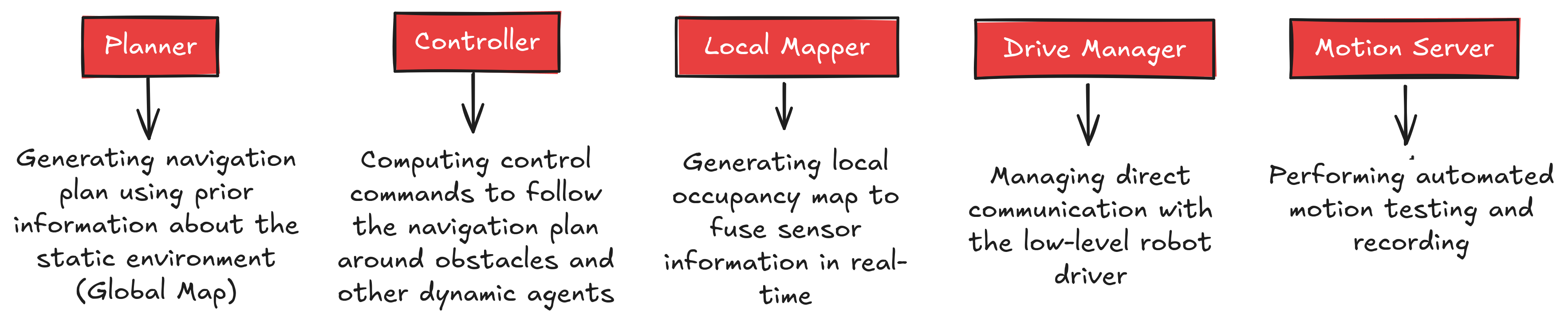
Core Components¶
Long-range Path finding Computes the optimal route from the robot’s current pose to a goal.
Local Motion Control Generates precise motion commands.
Real-time Environment Context Builds a high-speed occupancy representation of the immediate surroundings.
Hardware Interface & Safety The final gateway to the robot’s actuation.
Global Data Management Serves static 2D/3D map files to the rest of the stack.
Calibration & recording Runs automated tests and performs motion recording for calibration and validation
Sensing Requirements¶
Kompass scales with your hardware, from minimal lab setups to sensor-heavy industrial platforms.
Minimum Requirements¶
To get the baseline navigation running, you need:
Odometry: Wheel encoders, IMU, or Visual Odometry.
Obstacle Detection: 2D LiDAR or a Depth Camera.
Global Pose: A localization source (e.g., AMCL, SLAM, or GPS).
Enhanced Features¶
Unlock advanced capabilities with additional sensors:
Depth Cameras: Enable 3D obstacle avoidance and robust RGB-D Vision Following.
3D LiDAR: High-fidelity perception in complex, multi-level environments.
RGB Cameras: Enable semantic understanding and object-based navigation.
GPS/UWB: Precision localization for outdoor or large-scale indoor deployment.