Quick Start: Webots Simulator¶
Launch a full autonomous navigation stack in under 5 minutes.
In this tutorial, we use a single Python script, a “Recipe”, to build a complete point-to-point navigation system. We’ll use the Webots simulator and a Turtlebot3 to demonstrate how Kompass components link together.
1. Prepare the Environment¶
To make things easy, we created kompass_sim, a package with ready-to-launch simulation environments.
Build the Simulation: Clone and build the simulator support package in your ROS2 workspace:
git clone https://github.com/automatika-robotics/kompass-sim.git cd .. && rosdep install --from-paths src --ignore-src -r -y colcon build --packages-select kompass_sim source install/setup.bash
Launch Webots: Start the Turtlebot3 simulation world. This will bring up Webots, RViz, and the robot localization nodes:
ros2 launch kompass_sim webots_turtlebot3.launch.py
Webots Simulation: Turtlebot3 in a house environment¶
3. Run and Navigate¶
Open a new terminal and run your recipe:
python3 quick_start.py
You will see the components starting up in the terminal. Once ready, you have two ways to control the robot.
Option A: The Kompass Web UI¶
The recipe includes launcher.enable_ui(...), which automatically spins up a lightweight web interface for monitoring and control.
Check Terminal: Look for a log message indicating the UI URL: http://0.0.0.0:5001.
Open Browser: Navigate to that URL.
Send Goal: You will see the map and the robot’s live position. Simply click the publish point button and Click anywhere on the map to trigger the Planner and send the robot to that location.
Kompass UI View: Point Navigation Recipe¶
Option B: RViz¶
If you prefer the standard ROS tools:
Go to the RViz window launched in Step 1.
Select the Publish Point tool (sometimes called
Clicked Point) from the top toolbar.Click anywhere on the map grid.
The robot will plan a path (Blue Line) and immediately start driving.
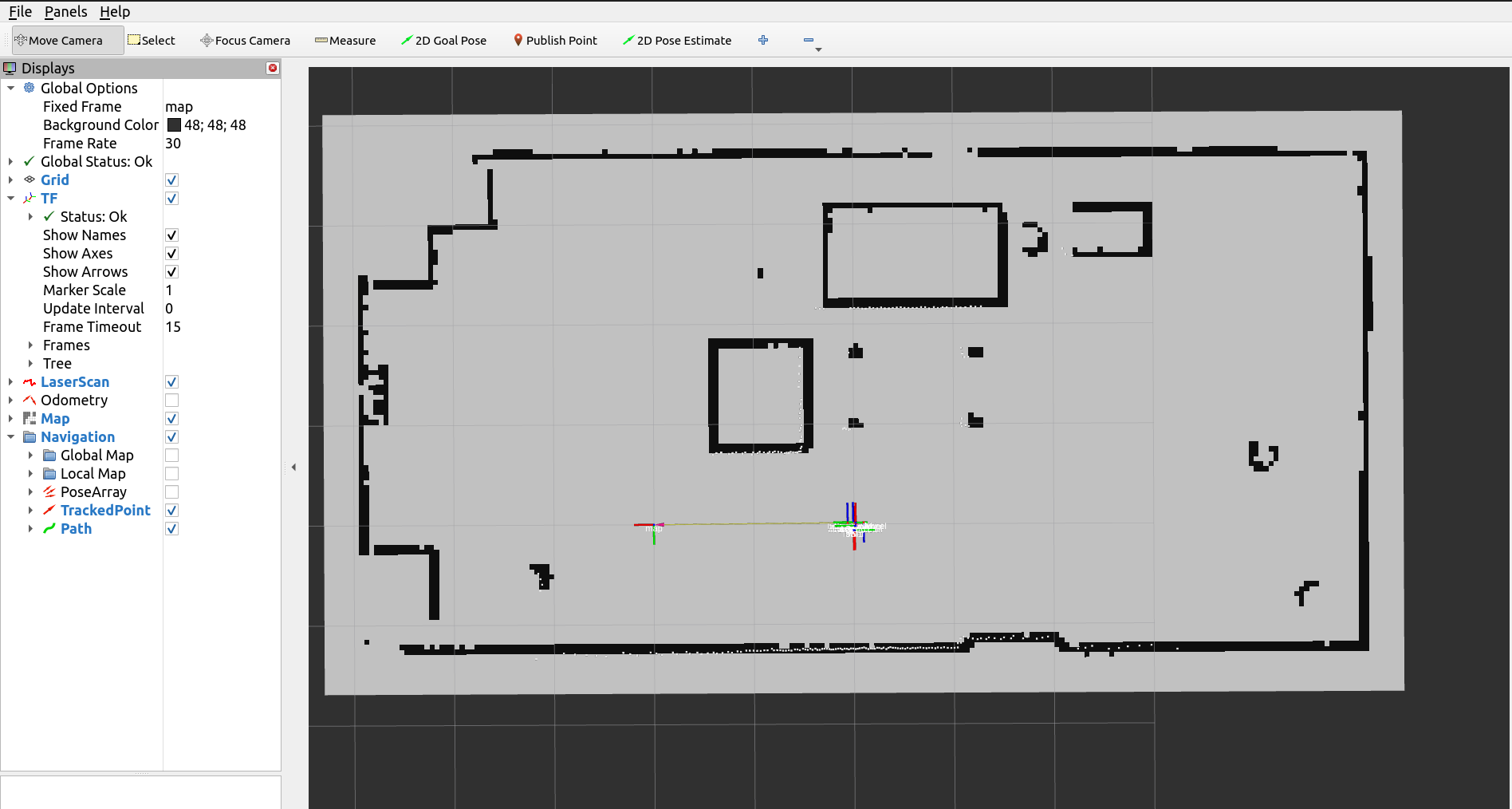
RViz View: Blue line shows the global path, red arrow shows the local command.¶
What just happened?¶
Components: You configured your robot and the navigation components directly directly in your python recipe.
Launcher: Automatically managed the lifecycle of 5 ROS2 nodes in multi-processing.
Web UI: Visualized the map, plan, and odometry topics instantly without installing extra frontend tools.
Tip
Check the Point Navigation Guide for a deep dive into this recipe.